Untuk keperluan tersebut digunakan suatu alat yang bekerja berdasarkan prinsip pemantulan gelombang bunyi yang disebut SONAR (Sound Navigation Ranging).
Sonar digunakan untuk mengukur kedalaman laut.
Prinsip kerja SONAR berdasarkan prinsip pemantulan gelombang ultrasonik. Alat ini diperkenalkan pertama kali oleh Paul Langenvin, seorang ilmuwan dari Prancis pada tahun 1914. Pada saat itu Paul dan pembantunya membuat alat yang dapat mengirim pancaran kuat gelombang bunyi berfrekuensi tinggi (ultrasonik) melalui air. Pada dasarnya SONAR memiliki dua bagian alat yang memancarkan gelombang ultrasonik yang disebut transmiter (emiter) dan alat yang dapat mendeteksi datangnya gelombang pantul (gema) yang disebut sensor (reciver).
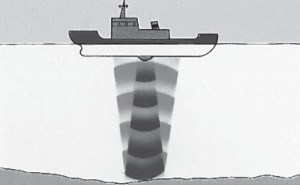
Gelombang ultrasonik dipancarkan oleh transmiter (pemancar) yang diarahkan ke sasaran, kemudian akan dipantulkan kembali dan ditangkap oleh pesawat penerima (reciver). Dengan mengukur waktu yang diperlukan dari gelombang dipancarkan sampai gelombang diterima lagi, maka dapat diketahui jarak yang ditentukan. Untuk mengukur kedalaman laut, SONAR diletakkan di bawah kapal.
Dengan pancaran ultrasonik diarahkan lurus ke dasar laut, dalamnya air dapat dihitung dari panjang waktu antara pancaran yang turun dan naik setelah digemakan. Apabila cepat rambat gelombang bunyi di udara v, selang waktu antara gelombang dipancarkan dengan gelombang pantul datang adalah Δt, indeks bias air n, dan kedalaman laut adalah d maka kedalaman laut tersebut dapat dicari dengan persamaan :
dengan :
d = jarak yang diukur (m)
Δt = waktu yang diperlukan gelombang dari dipancarkan sampai diterima kembali (s)
v = kecepatan rambat gelombang ultrasonik (m/s)
n = indeks bias medium
Δt = waktu yang diperlukan gelombang dari dipancarkan sampai diterima kembali (s)
v = kecepatan rambat gelombang ultrasonik (m/s)
n = indeks bias medium

a. Langkah pemancaran pulsa sinyal gelombang akustik.
b. Langkah penerimaan pulsa gema yang dipantulkan oleh objek bawah air.
Secara garis besar menurut (Alam Ikan 1), sonar dapat dibedakan atas tiga tipe, yaitu:
1. Berdasarkan arah ‘‘transducer“ memancarkan pulsa sinyal, dapat dibedakan atas lima jenis:
a. “Fixed transducer type sonar”
- Arah pancara pulsa selalu tetap, yang lebih dikenal dengan fish finder pada arah vertikal.
b. “Scanning sonar”
- Arah pancaran pulsa dapat diputar (scanning) horizontal (0o - 360o) dan vertikal (90o - 180o).
c. “Search light sonar”
- Arah pancaran sinyal dapat diubah-ubah menurut train angle ke arah vertikal maupun horizontal.
d. “Side sounder”
- Pancaran pulsa sinyal diarahkan ke arah samping kapal (kanan-kiri kapal) digunakan pada kapal penyapu ranjau.
e. “Net Zounde”
- Digunakan pada kapal ‘mid water trauler” untuk mengetahui tinggi bukaan mulut jaring serta kedudukan jaring terhadap dasar dan permukaan perairan.
f. “Telesounder”
- Merupakan pengembangan dari “fixed transducer type” serta “searchlight sonar”. Prinsip kerjanya memancarkan dan meneruskan tampilan data dari suatu pesawat penerima ke pesawat penerima lainnya melalui satelit.
2. Jenis sonar berdasarkan tampilan dislpy unit, dibedakan atas empat jenis, yaitu:
a. “Dry recording paper”
- Data yang tersaji pada kertas perekam kering dapat dipertahankan dan disimpan dalam waktu yang lama sehingga dapat dilihat kembali bila dibutuhkan. Kelemahannya adalah sensitivitas pencatatannya kurang dan serbuk karbon akibat goresan “stylus” terhadap kertas beraroma sangat menyengat.
b. “Moist recording paper”
- Tampilan data sonar disajikan pada perekam basah. Kelebihannya tidak berbau dan sensitivitasnya lebih baik dan goresan pencatatan lebih jelas, kertasnya dapat dipakai ulang asalkan data rekamannya dihilangkan dulu dengan larutan khusus. Kelemahannya bila kelembaban kertas berkurang, mudah sobek dan berkerut sehingga memerlukan perawatan khusus.
c. “Flasher oscilating scope”
- Sonar ini berteknologi tinggi. Setiap objek dapat diidentifikasi berdasarkan perbadaan warna pada layer monitor. Kelebihannya, sensitivitasnya jauh lebih tinggi, tidak memerlukan kertas perekam, tidak menimbulkan serbuk karbon, tidak berbau. Kelemahannya, memori data tidak dapat disimpan dalam waktu lama, jika dibutuhkan reproduksi memori data memerlukan peralatan khusus (“cassette data recorder”) dan printer.
- Merupakan perangkat tambahan dari sonar lainnya. Tidak memerlukan rekaman data (pada kertas perekam, ataupun layar CRT). Tampilan data berbentuk memori digital.
3. Jenis sonar berdasarkan frekuensi kerja, dikelompokkan dalam dua jenis, yaitu:
a. “Low frequency sonar”
- Menggunakan pancaran pulsa frekuensi rendah. Penggunaannya hanya sebagai “echosounder“ dan kurang layak digunakan sebagai“ fish finding sonar‘, karena sensitivitas penerimaannya tidak sepeka “fish finding sonar“.
b. “High frequency sonar”
- Memencarkan pulsa pada frekuensi tinggi, tingkat kepekaannya lebih baik. Pada umumnya dipakai sebagai “fish finding sonar", yaitu alat bantu untuk mendeteksi dan mengamati perkembangan kumpulan ikan di bawah permukaan air.
Kegunaan SONAR
Saat ini kapal ikan banyak memanfaatkan sonar dalam memberikan gambaran dan informasi tentang kedalaman, keadaan alami dasar, serta konfigurasi bentuk dasar perairan. Kemudian pada kapal ikan digunakan untuk memperoleh informasi tentang ukuran, densitas, distribusi, kecepatan dan arah renang “fish schools”, serta mengetahui bentuk dan kedudukan jaring dalam air, mengetahui ikan yang masuk ke dalam jaring. Pada kegiatan ilmiah, sonar digunakan dalam pendugaan stok populasi ikan, DSL (“Deep Scattering Layer”), “current barrier” (pertemuan arus) (Alam Ikan 3).
Penggunaan sonar pada kapal penangkap ikan demersal adalah “fixed transducer type sonar”, lebih dikenal dengan “fish finder”. Kapal tersebut memiliki fungsi ganda disamping sebagai pendeteksi, juga berfungsi untuk mengetahui konfigurasi serta jenis dasar perairan (Alam Ikan 3
SUMBER : http://fisikazone.com/penerapan-gelombang-bunyi-dalam-teknologi/
http://aurelsains.blogspot.com/2018/03/aplikasi-getaran-dan-gelombang-dalam_25.html






Tidak ada komentar:
Posting Komentar